| Version 1 (modified by mark1, 12 years ago) (diff) |
|---|
Post Processing LiDAR Point Clouds
The usual form of delivery of the processed LiDAR data is in the form of a point cloud. This takes one of two forms; [link ASCII text files] or binary LAS files. As part of the standard processing and quality checking of the LiDAR point clouds, ARSF-DAN classify 'noisy' points. This is done both by using automatic algorithms and by viewing the data. The noisy points can be one of the following:
- isolated points
- isolated clusters of points
- water induced noise
- cloud noise
- system noise
It is advised that these points be removed before using the data, unless they are of specific use to your studies.
Removing Noise Points
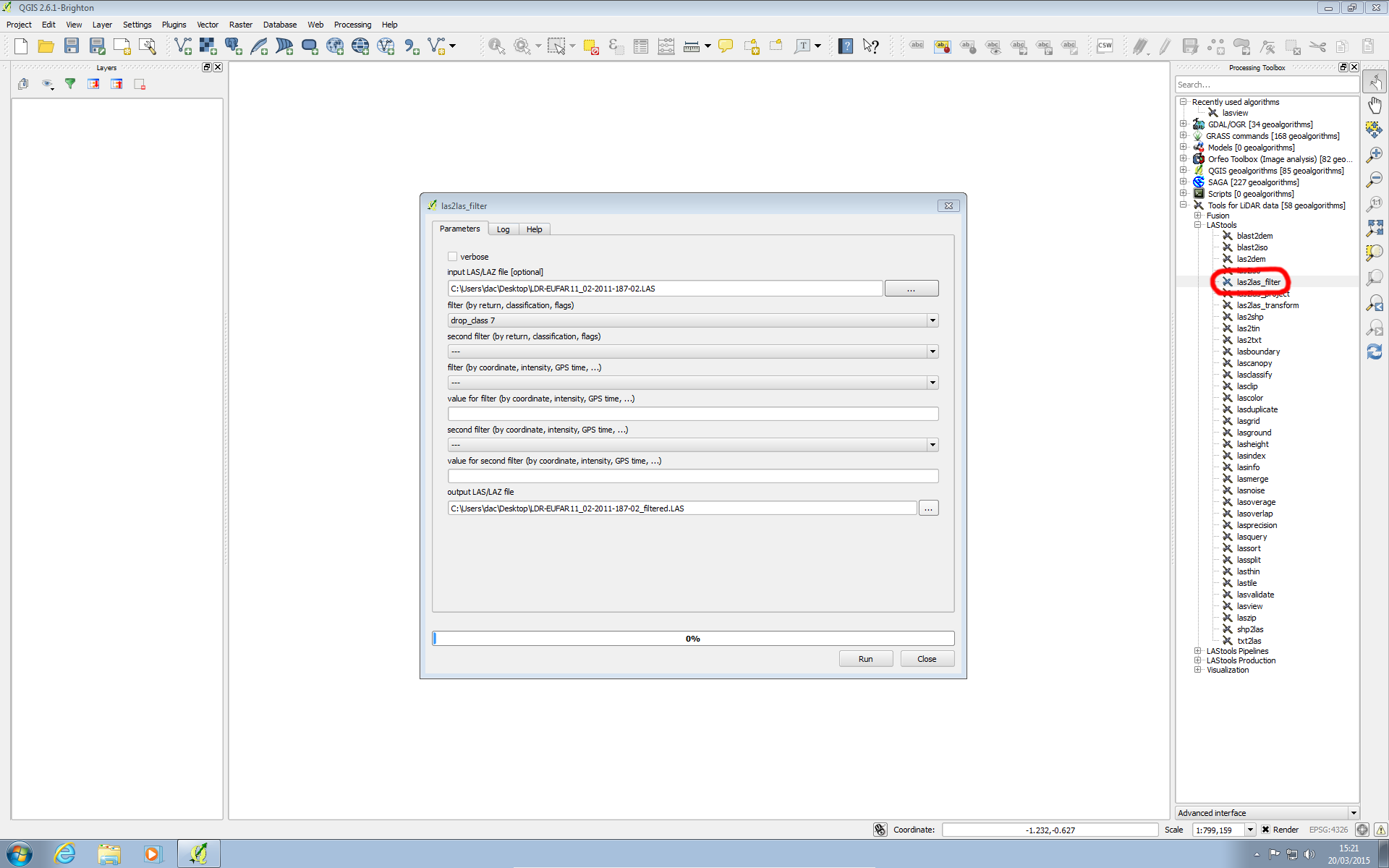
When a point has been identified as being 'noise' it is given a classification value of '7'.
Attachments (1)
- qgis_las2las_filter.png (158.2 KB) - added by dac 9 years ago.
{kind=link}
{kind=link}
Download all attachments as: .zip