Creating a DEM from a LIDAR point cloud
One of the most common uses of LiDAR data is to generate a high resolution Digital Elevation Model (DEM) raster. This page explains the steps used by NERC-ARF to generate DEMs from the LAS format point clouds provided as part of the standard delivery.
For data delivered before 2009 in .all ASCII format you can convert to LAS format using convert_pre2009_lidar.py from https://github.com/pmlrsg/arsf_tools/ for example:
convert_pre2009_lidar.py -i in_lidar_ascii.all -o out_lidar_las.las
Then proceed with the instructions below.
LiDAR only DEM
For LiDAR deliveries from 2016 onwards the LiDAR DEM is generated with the NERC-ARF DEM scripts (https://github.com/pmlrsg/arsf_dem_scripts) using a command similar to:
las_to_dsm.py --method points2grid --projection UKBNG -r 2 \
-o dem/RG15_18-2015_290a-lidar-bng.dem \
flightlines/las1.2/*.LAS
Where the projection is given in the readme file.
This command will merge all LAS files together using `lasmerge`, dropping any points with class 7 (noise).
To generate to DEM the points2grid program is called as part of the script with the following options:
points2grid --exclude_class 7 --output_file_name /tmp/RG15_18-2015_290a-lidar-bng \
--search_radius 2 --output_format arc --resolution 2 \
--idw --fil_window_size 7 \
--first_return_only
Points to grid uses inverse distance weighted interpolation to generate the DEM, more details about the method used are available from http://www.opentopography.org/otsoftware/points2grid. As only first returns are considered the resulting raster is a Digital Surface Model (DSM), representing the top of canopy and buildings.
To generate a LiDAR only DEM using the same method as deliveries prior to 2016 use the flag --method GRASS, this will take the average of all non-noise first return points within each grid cell.
Patched DEM for use in APL
For processing hyperspectral data in APL a second DEM is supplied with delivered data, reprojected to WGS84 Lat/Long and patched with another DEM (normally ASTER) to extend coverage and fill in any gaps. For deliveries after 2016 a command similar to the one below is used to generate a patched LiDAR and ASTER DEM:
create_dem_from_lidar.py --in_projection UKBNG --out_projection WGS84LL \
--aster --gridded \
-o dem/RG15_18-2015_290a-lidar_ASTER-wgs84_latlong.dem \
RG15_18-2015_290a-lidar-bng.dem
For deliveries before 2016 the command was similar but a directory containing LAS files is passed in and the --las flag is used to indicate the LiDAR data should be gridded before patching.
For more details on this command, and usage outside the NERC-ARF-DAN systems see the tutorial.
Attachments (4)
-
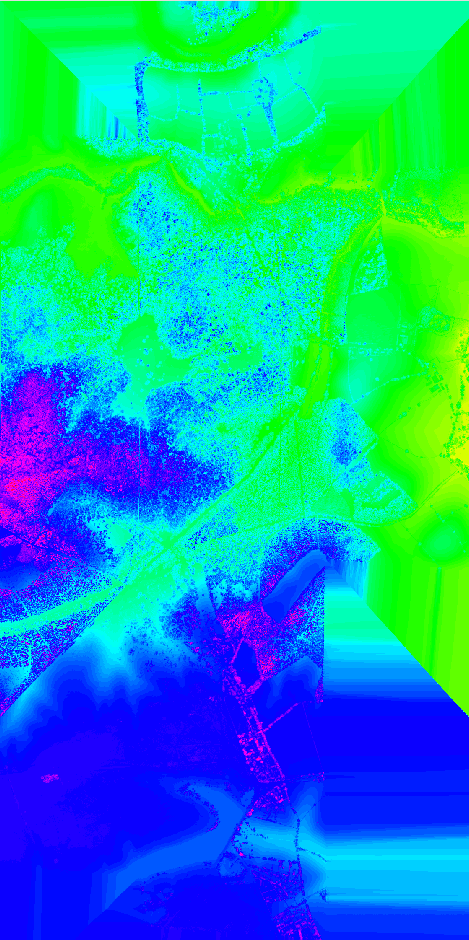
mosaic_with_holes.png
(340.5 KB) -
added by mark1 15 years ago.
Point cloud mosaic - gridded 2m
-
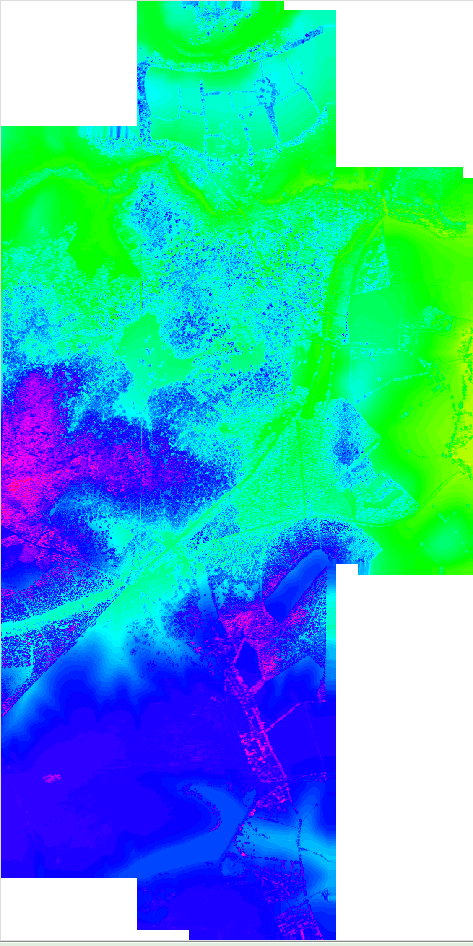
interp_full_region.png
(293.7 KB) -
added by mark1 15 years ago.
interpolated full region
-
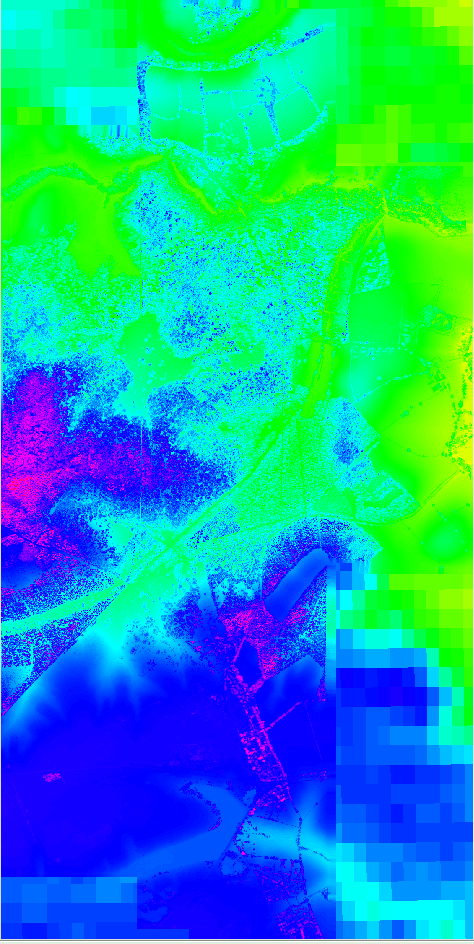
interp_with_mask.png
(305.4 KB) -
added by mark1 15 years ago.
interpolated with mask
-
combo_srtm_lidar.png
(341.8 KB) -
added by mark1 15 years ago.
Combined SRTM and Lidar DEM
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Download all attachments as: .zip